Missing Determiners - Common Errors in English
Determiners are small words that go in front of nouns (also known as “noun modifiers”). The main purpose of determiners is to “mark” a noun, or to “determine” its context. Determiners identify which person or thing a sentence is describing. Sometimes, determiners “determine” if the noun/pronoun is definite or indefinite. Determiners can also describe to whom the noun belongs, or how many of the noun there are.
The Grammar of Determiners
In English, determiners as a class include the following lexical categories:
- Articles (a, an, the) - This is the most common type of determiner.
The is the definite article used when describing a specific noun which is one of its kind.
A and an are the indefinite articles, used when describing nonspecific nouns.
- Demonstratives (this, that, these, those, which, etc.)
- Possessive Determiners a.k.a. Possessive Pronouns (my, your, his, her, their, etc.)
- Quantifiers (few, some, many, all, any, every, each, no, not much, a little, etc.)
- Cardinal Numbers (one, two, sixty-six, ninety-nine)
Numbers beginning with 100 require a determiner (i.e. a hundred ways).
In most Indo-European languages (e.g. English), determiners are separate words that precede nouns. However, in some languages, determiners come in the form of prefixes or suffixes added onto nouns, as is the case in Scandinavian languages.
For this reason, it is common for non-native English speakers to omit determiners.
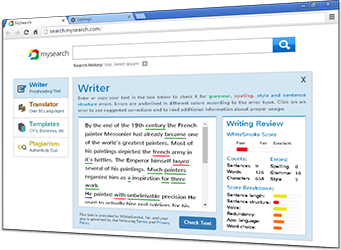
Fixing Missing Determiners with WhiteSmoke
Missing Determiner #1:
I bought shirt at the store.
Whitesmoke’s Suggestion(s):
Whitesmoke’s Explanation:
“This phrase requires either an article (‘a/the’), or changing the noun to the plural form.”
Missing Determiner #2:
The President talked about how to solve economic crisis.
Whitesmoke’s Suggestion(s):
Whitesmoke’s Explanation:
“This phrase requires either an article (‘a/the’), or changing the noun to the plural form.”